Home
Halaman Muka

Sajian Utama
Sajian Khusus
Komputer
Energi
Elektronika
|
|
|
|
Hasil Pengujian
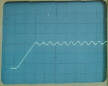
Pengujian eksperimen ini memberikan nilai ultimate
gain Ku sebesar 55 dan ultimate period Tu sebesar
0.35 s. Nilai yang diperoleh digunakan untuk menghitung nilai parameter
pengontrol proporsional, integral dan diferensial. Gambar 6 menunjukkan
foto osiloskop ketika respon berosilasi. Hasil perhitungan ini ditunjukkan
oleh Tabel 1.
Gambar 6:
Hasil Osiloskop respon sistem berosilasi
Tabel 1:
Hasil penalaan paramater PID dengan
metode osilasi
|
Pengatur
|
P
|
PI
|
PID
|
|
Kp
|
27.50 |
24.75 |
33 |
|
Ti
|
-
|
0.2975 |
0.175 |
|
Td
|
-
|
-
|
0.042 |
Sistem dengan Pengontrol P
Pada pengujian pertama, Sistem kontrol servo
posisi disisipi oleh pengontrol proporsional (P). Karakteristik pengontrol
P diperoleh dengan menyetel parameter integral Ti=~ dan parameter diferensial
Td=0. Pengamatan prilaku sistem didasarkan pada spesifikasi waktu sistem:
waktu naik, waktu tunda, waktu puncak dan lewatan maksimum. Tabel 2 menunjukkan
pengaruh pengubahan parameter proporsional terhadap spesifikasi waktu sistem.
Gambar 7 menunjukkan salah satu hasil respon sistem untuk pengontrol proporsional
dengan Kp=27,50.
Tabel 2:
Respon sistem , dengan nilai Ti = ~,
Td = 0, dan Kp berubah.
|
Parameter
|
Nilai Penguatan ( Kp )
|
|
Respon Transien
|
1
|
10
|
27.50
|
50
|
|
Waktu tunda ( td )
|
-
|
0.5 s
|
0.5 s
|
0.55 s
|
|
Waktu naik ( tr )
|
-
|
0.9 s
|
0.95 s
|
0.95 s
|
|
Waktu puncak ( tp )
|
-
|
-
|
1.05 s
|
1.05 s
|
|
Lewatan waktu maksimum
( Mp )
|
-
|
-
|
3 %
|
5.4 %
|
Gambar 7:
Respon sistem dengan Kp=27,50
|
|
|
|
|
Sistem dengan Pengontrol PI
Pengujian kedua bertujuan mengamati pengaruh pengubahan parameter integral
Ti pada pengontrol PI terhadap spesifikasi sistem. Karakteristik pengontrol
PI diperoleh dengan menyetel Td=0. Tabel 3 memperlihatkan hasil pengamatan
itu, sedangkan gambar 8 menunjukkan hasil osiloskop untuk Kp=24,75 dan
Ti=0,2975.
Tabel 3:
Respon sistem , dengan nilai Kp = 24.75, Td = 0, dan Ti berubah.
|
Parameter
|
Konstanta waktu integral, Ti
|
|
Respon Transien
|
0.01
|
0.2
|
0.2975
|
0.5
|
|
Waktu tunda ( td )
|
-
|
0.58 s
|
0.55 s
|
0.56 s
|
|
Waktu naik ( tr )
|
-
|
0.95 s
|
0.98 s
|
1 s
|
|
Waktu puncak ( tp )
|
-
|
1.79 s
|
1.62 s
|
1.8 s
|
|
Lewatan waktu maksimum
( Mp )
|
-
|
85.6 %
|
74 %
|
58.8 %
|
Gambar 8:
Respon sistem dengan Kp=24,75 dan Ti=0,2975
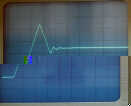
Sistem dengan Pengontrol PID
Hasil pengujian respon sistem yang menggunakan
pengontrol PID ditunjukkan oleh tabel 4. Gambar 9 memperlihatkan hasil
osiloskop untuk pengontrol Kp=33, Ti=0,175 dan Td=0,042.
Tabel 4:
Respon sistem, dengan nilai Kp = 33,
Ti = 0.175, dan Td berubah
|
Parameter
|
Waktu diferensial (Td)
|
|
Respon Transien
|
0.002
|
0.05
|
0.042
|
0.10
|
|
Waktu tunda ( td
)
|
0.6 s
|
0.6 s
|
0.6 s
|
0.65 s
|
|
Waktu naik ( tr
)
|
1 s
|
1 s
|
1 s
|
1.1 s
|
|
Waktu puncak (
tp )
|
1.8 s
|
1.8 s
|
1.8 s
|
1.85 s
|
|
Lewatan waktu maksimum
( Mp )
|
86.8 %
|
88 %
|
88 %
|
88 %
|
Gambar 9: Respon sistem dengan Kp=33,Ti=0,175
dan Td=0,042
Kesimpulan
-
Algoritma pengontrol PID menggunakan metode pendekatan rectangular dan
trapezoidal. Hasil eksperimen menunjukkan bahwa perangkat lunak yang disusun
dapat mengendalikan perangkat keras sesuai dengan perancangan.
-
Parameter pengontrol PID berupa Kp, Ti, Td ditentukan melalui metode penyetelan
Ziegler-Nichols. Nilai penguatan yang didapat dari percobaan besarnya adalah
-
Untuk pengontrol proporsional
Kp = 27.50
-
Untuk pengontrol proporsional plus integral
Kp = 24.75, Ti = 0.2975
-
Untuk pengontrol proporsional plus integral plus diferensial
Kp = 33, Ti = 0.175, Td = 0.042
-
Respon sistem yang memuaskan diperlihatkan oleh pengontrol proporsional.
Besarnya nilai terletak disekitar nilai pendekatan yang diperoleh dengan
metode Zeigler dan Nichols.
Daftar Pustaka
-
Ziegler, J. G. dan N.B. Nichols, 1942, Optimum Setting for Automatic Controllers,
Tans. ASME, vol. 64, pp. 759-768.
-
Gunterus, Frans: Falsafah Dasar: Sistem Pengendalian Proses, jakarta: PT.
Elex Media Komputindo, Jakarta, 1994.
-
Johnson, Curtis: Process Control Instrumentation Technology, Englewood
Cliffs, New Jersey, 1988.
-
Ogata, Katsuhiko: Teknik Kontrol Automatik – terjemahan: Ir. Edi Laksono,
Erlangga, Jakarta, 1991.
Oleh : Ir. Chairuzzaini, Dipl. -Ing. Ir. Mohammad
Rusli: Staf Pengajar di jurusan teknik elektro, FT-Unibraw-Malang.
E-Mail: rusli@unibraw.wasantara.net.id
Rudy Ariyanto, ST : Sarjana teknik Elektro - Fakultas Teknik - Universitas
Brawijaya - Malang.
|

{kind=link}
{kind=link}
{kind=link}
{kind=link}